Agrobótica no Séc. XXI: Conquistas e Expectativas da Agricultura de Precisão
Artigo Técnico
O objetivo da Agricultura de Precisão é aplicar inputs apenas onde estes são necessários e sempre na quantidade requerida. Ainda que a Agricultura de Precisão se associe a equipamentos caros e Hi-tech, os constantes avanços em eletrónica, informática e fotónica estão a permitir que este tipo de agricultura esteja cada vez mais ao alcance de um cada vez maior número de utilizadores. Para além disso, os benefícios associados à sua implementação poderão cobrir facilmente os investimentos iniciais. Neste artigo, introduzem-se os conceitos básicos de Agricultura de Precisão e apresentam-se os principais âmbitos que atualmente estão a ser objeto de investigação.
O Grupo de Investigação em AgróTICa e Agricultura de Precisão (GRAP, www.grap.udl.cat) aglutina investigadores de dois organismos: a Universidade de Lleida (UdL) e o Centro de Mecanização Agrária da Catalunha. O grupo leva mais de uma década a trabalhar no âmbito da Agricultura de Precisão, incorporando sensores ultrassónicos e de base fotónica, as tecnologias de informação e as comunicações (TIC) e as técnicas geoestatísticas na agricultura. Desta forma, é um dos grupos de referência em Tecnologias para a Aplicação de Produtos Fitossanitários a nível estatal. No âmbito da Pecuária de Precisão, o GRAP é pioneiro no desenvolvimento de equipas robotizadas para a alimentação inteligente no setor dos suínos, com o objetivo de reduzir o impacto ambiental e aumentar a segurança alimentar. No presente artigo, abordam-se diferentes fases da Agricultura de Precisão, dando ênfase aos trabalhos realizados pelo GRAP.
O QUE É A AGRICULTURA DE PRECISÃO?
A Agricultura de Precisão não é mais do que a consequência da chegada das Tecnologias de Informação e Comunicação à Agricultura, também denominadas AgroTICs. As AgroTICs permitem a aquisição de dados do cultivo e do seu meio, o consequente processamento desses mesmos dados para conversão em informação útil e o tratamento e armazenagem dessa informação para a tomada de decisão e ação. Dispor de informação detalhada sobre as características do cultivo e do seu meio (o solo, o clima, etc.) ajuda o agricultor e o técnico experientes a tomar decisões melhor fundamentadas.
Todos os agricultores sabem que os seus campos não produzem exatamente o mesmo em toda a sua superfície. Ainda assim, não é quando se quantificam essas diferenças na produtividade que se vê imediatamente a magnitude que pode alcançar essa variabilidade.
Ter em conta essa variabilidade na gestão das parcelas é o objetivo da Agricultura de Precisão. Essa informação aconselha a que certos campos sejam geridos não de forma uniforme mas de forma variável, atendendo às características das diferentes zonas que os compõem. Este tipo de gestão chama-se Gestão Específica Localizada (do inglês Site-Specific Management) e consiste na realização de trabalhos agrícolas ou aplicação de inputs de forma variável em partes distintas das parcelas que assim o exigem. Para além disso, em determinados casos, como na silvicultura, pode-se chegar (e chegar-se-á em breve!) à gestão das explorações ao nível de plantas individuais.
Ao alcance de todos
Ainda que a Agricultura de Precisão seja associada a equipamentos dispendiosos e à alta tecnologia, também é possível aplicá-la de forma mais básica. A recolha de informação pode ser realizada a partir de observações visuais e a aplicação poderá ser feita de forma manual ou utilizando adequadamente, e de forma “inteligente”, a maquinaria convencional. Contudo, este tipo de ações aumentará o custo de mão de obra e reduzirá a precisão das operações. Como em qualquer caso, há que fazer uma boa análise dos custos e optar pela melhor solução.
Vantagens e desvantagens
A prática da Agricultura de Precisão aumenta a rentabilidade das explorações através da melhoria na gestão dos inputs/consumos. Contudo, a análise dos dados e uma acertada tomada de decisões poderá, inclusivamente, melhorar a qualidade dos produtos, reduzir os riscos das operações, realizar uma correta rastreabilidade das operações agrícolas e da produção, reduzir o impacto ambiental e aumentar a sustentabilidade das explorações.
Em contrapartida, aplicar a Agricultura de Precisão requer uma formação adicional dos agricultores e dos técnicos em termos de aquisição e processamento de dados e em novas tecnologias aplicadas à maquinaria agrícola.
METODOLOGIAS APLICADAS
A prática da Agricultura de Precisão pode ser levada a cabo segundo duas grandes metodologias: uma baseada em mapas digitais de informação, e outra baseada em sensores em tempo real. Enquanto que os sistemas baseados em mapas permitem ter em conta muito mais variáveis e realizar análises muito mais complexas que os sistemas baseados em sensores e em tempo real, estes últimos permitem uma reação muito mais rápida, relativamente a situações em que sejam necessárias intervenções diligentes.
Agricultura de Precisão baseada em mapas digitais de informação
Antes de qualquer operação é necessário anotar os dados da parcela, analisar a sua variabilidade espacial e criar um mapa com a distribuição espacial da variável mensurada.
Após os processos e análises pertinentes, o resultado da etapa de tomada de decisão será um novo mapa, denominado mapa de prescrição ou atuação, onde se mostra o que se deve fazer em cada ponto da parcela (intensidade da operação ou dose de produto a aplicar). Um controlador eletrónico acoplado no trator determinará o que fazer em cada ponto e um equipamento dotado de tecnologia de atuação variável será, usualmente, o que a levará a cabo.
Para praticar este tipo de agricultura é indispensável dispor de um sistema de posicionamento e navegação global (vulgarmente conhecido como GPS), quer para a recolha de dados como para a atuação. Como exemplo, poder-se-á pensar na aplicação de um herbicida a partir de um mapa de prescrição, onde se indica a necessidade de aplicar ou não o produto com base na presença/ausência de uma determinada erva daninha e também a dose, no caso de ser necessária a sua aplicação.
Agricultura de Precisão baseada em Sensores e em tempo real
Este tipo de tecnologia não requer sistemas de posicionamento e navegação, uma vez que a recolha de dados, a decisão e a atuação, são levadas a cabo em tempo real, enquanto que o trator e a equipa se vão deslocando pela parcela. Visto que a ação continua a ser variável, o equipamento também deve incorporar tecnologias de atuação variável. A diferença radica no facto da atuação não se basear num mapa predefinido mas sim num ou em vários sensores, que vão recolhendo dados sobre o progresso da parcela, e um controladoreletrónico que toma decisões também sobre essa evolução registada.
Como exemplo, a aplicação de herbicida descrita no caso anterior não se basearia num mapa mas sim na deteção da erva daninha em tempo real, a partir das medidas obtidas pelo sensor.
CARACTERIZAÇÃO DA VARIABILIDADE DOS CULTIVOS E DO MEIO FÍSICO
A caracterização da variabilidade espacial dos cultivos dentro das parcelas é um aspeto chave na Agricultura de Precisão. Na atualidade, existem diversas tecnologias disponíveis para caracterizar e reduzir a referida variação. Destas, os monitores de colheita nas ceifeiras/máquinas de vindimar são os mais conhecidos. Providenciam mapas da colheita, graças ao facto de georreferenciarem o peso do grão/uva, ou outro produto, em cada ponto da parcela. Uma alternativa aos monitoresde rendimento é a medição do vigor do cultivo, através de imagens de satélite ou imagens aéreas multiespectrais de alta resolução. O cálculo do vigor baseia-se na comparação de reflexão da vegetação na longitude de onda dos infravermelhos mais próximos (onde se produz a reflexão máxima da vegetação) e a do vermelho (onde se produz uma grande absorção de luz), ou da verde.
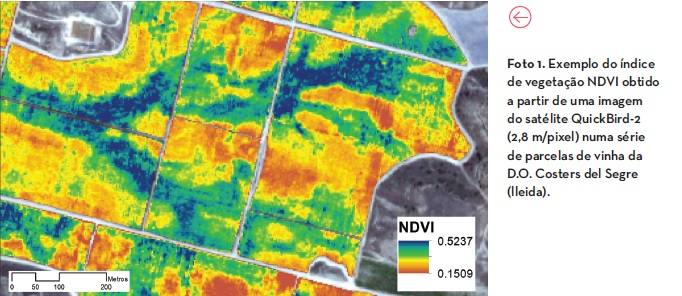
Melhoria na resolução espacial de imagens
A colocação em órbita do satélite Ikonos no ano 2000, possibilitou um grande avanço nesta temática, já que as suas imagens, com um tamanho de pixel de 3,2 m, permitem observar a variação dos cultivos com detalhe. Posteriormente, outros satélites comerciais como o QuickBird - 2 (2002), GeoEye - 1 (2008) ou o World - View - 2 (2009), entre outros, melhoraram a resolução espacial até à atual, de 1,85 m/pixel (Foto 1). Contudo, esta resolução pode resultar escassa para determinados cultivos, como os plantados ao longo das fileiras, dado que a resposta no pixel pode ser misturada (vegetação do cultivo + solo). Na última década, o aumento da resolução (até 0,15 - 0,25 m) foi conseguido a partir de câmaras multiespectrais montadas em avionetas, capazes de voar a uma altura muito menor do que os satélites. Ultimamente, o desenvolvimento e proliferação de “drones”, ou veículos aéreos não tripulados (UAV do inglês Unmanned Aerial Vehicles) permitiu aumentar ainda mais a resolução espacial das imagens (até 0,08 - 0,10 m/ píxel), o que permite caracterizar o vigor dos cultivos com grande detalhe.
Sensores de proximidade. Scâneres LiDAR
Em paralelo à disponibilidade de imagens de índices de vegetação de alta resolução espacial, surgiram os sensores de proximidade capazes de capturar de forma pontual o valor do índice de vegetação (ou outros índices) de uma planta ou de partes desta (p. e. GreenSeeker®, NTech Industries y Trimble; CropCircle®, Holland Scientific). Estes sensores são utilizados em diversas aplicações na Agricultura de Precisão, como a fertilização foliar do cultivo em função do NDVI “on-the-go” ou “real time” (em tempo real).
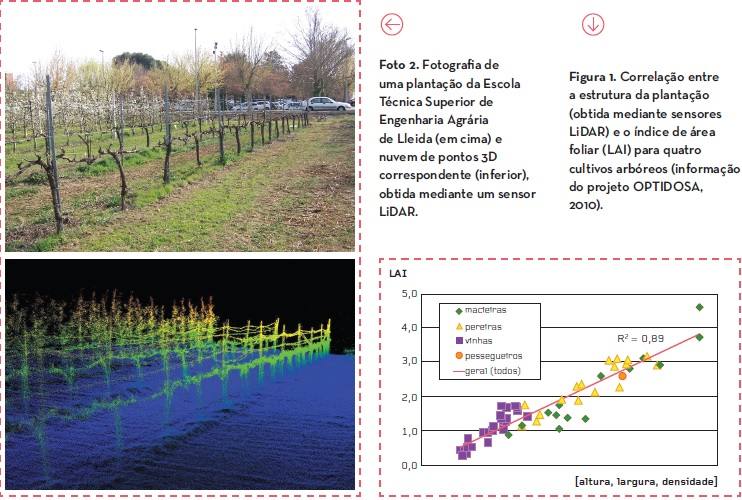
Nos últimos dez anos também se introduziu o uso dos sensores LiDAR (Light Detection and Ranging) para a caracterização dos cultivos arborizados (Rosell et al., 2009; Rosell and Sanz, 2012).
Estes sensores permitem obter imagens tridimensionais das plantações a partir da medida das distâncias do sensor às plantas, de forma similar a um RADAR, mas utilizando luz (radiação laser). Os trabalhos de investigação do GRAP sobre a caracterização das plantações mediante scâneres LiDAR foram pioneiros a nível mundial. Começou-se pela medida de árvores individuais para passar, posteriormente, à obtenção da estrutura 3D de filas inteiras. Recentemente, o GRAP desenvolveu a tecnologia adequada para obter o modelo 3D de plantações, como indica a foto 2.
TOMADA DE DECISÃO: SISTEMA DOSAFRUT
Um dos principais desafios da Agricultura de Precisão é facilitar as decisões em todo o tipo de cultivos. Aqui é onde os modelos e os sistemas de suporte às decisões adquirem uma importância crucial. Neste contexto, o sistema DOSAFRUT, desenvolvido pelo GRAP, permite ajustar a dose em tratamentos fitossanitários de todo o tipo de plantações, sistemas de formação, dimensões, vigor e densidade foliar.
O sistema DOSAFRUT baseia-se na premissa de que a dose global de produto fitossanitário deve estar diretamente relacionada com as dimensões da plantação a proteger, concretamente, duas vezes a sua superfície foliar, tal como se pôde concluir no Projeto Air Assisted Sprayers (1997). Para além disso, a fração útil da pulverização (depositada sobre o objetivo) deve complementar-se com a que se perde em forma de desvio e/ou por desperdício no solo.
O sistema estima a área foliar de plantação a partir da altura e largura das filas, juntamente com a densidade das árvores, calculada a partir da porosidade (buracos) da parede frutícola.
Isso é possível a partir da constatação de que as plantações intensivas mantêm uma mesma relação entre os parâmetros mencionados e o índice de área foliar (superfície de folhas por unidade de superfície de cultivo) (Figura 1).
A relação foi estabelecida graças a um extensivo trabalho de medição da superfície foliar mediante sensores LiDAR.
O sistema DOSAFRUT supõe que a concentração de produto fitossanitário na fertilização é a recomendada na etiqueta da embalagem e estabelece o volume teórico a pulverizar em função da superfície foliar estimada. A esse volume, adiciona-se o correspondente ao desperdício previsto pelo desvio e desperdício sobre o solo, calculado a partir das indicações dadas.
A eficiência da aplicação (proporção de produto fitossanitário depositado sobre o objetivo em relação ao total aplicado), na sua maior parte, está determinada pelo pulverizador (tipo, bicos pulverizadores e condições de operação).
Um equipamento de baixas prestações, operando em condições não favoráveis, pode requerer até 85% mais de volume de fertilização fitossanitária.
No conjunto, a eficiência dos tratamentos oscila entre 25%, nas condições mais desfavoráveis, e 75%, em condições ótimas.
A determinação da eficiência global e do volume da fertilização otimizada pode realizar-se de forma rápida com a ferramenta disponibilizada no portal da DOSAFRUT, acessível no seu website - www.dosafrut.es (Foto 3). O sistema DOSAFRUT foi validado mediante numerosos ensaios à escala comercial no controlo das principais pragas e doenças das principais espécies de fruto cultivadas em Espanha: macieira, pereira e pessegueiro. Atualmente, é uma ferramenta de máxima utilidade nas explorações que utilizam estratégias sustentáveis destinadas a minimizar o emprego de produtos fitossanitários.
ATUAÇÃO VARIÁVEL: TRATAMENTOS FITOSSANITÁRIOS, REGA E FERTILIZAÇÃO
No âmbito dos tratamentos fitossanitários estão-se a registar importantes avanços, tanto na técnica de aplicação seletiva (patch-work) como nos sistemas de dosagem variável proporcional.
Ambos os sistemas utilizam sensores para a deteção do organismo (praga, doença ou erva daninha a controlar) ou as dimensões da vegetação a proteger.
Este é o caso de WeedSeeker®, que pulveriza de forma seletiva em tratamentos herbicidas - unicamente na presença de ervas daninhas objeto de controlo. Isto é possível graças à captação da luz refletida proveniente de um conjunto de LEDs instalados sobre o dispositivo de controlo, que inclui também um processador eletrónico e uma válvula de controlo que ativa/desativa o bico pulverizador com a calda herbicida. O sistema é especialmente interessante para o controlo herbicida de cultivos extensivos, jardins, vias de comunicação e zonas urbanizadas.
Para o tratamento de plantações de fruta, vinhas, cítricos e oliveiras, já há alguns anos, vêm a ser utilizados sensores de ultrassons, capazes de detetar a vegetação no início e final das filas em plantações intensivas, ou os espaços intermédios entre árvores nas plantações tradicionais. A partir desta informação, o sistema embutido no pulverizador faz a gestão da pulverização seletiva (Foto 4).
Com o mesmo tipo de sensor, também é possível medir em tempo real a alturas das árvores ou as variedades a tratar e, desta forma, pulverizar uma dose de acordo com o volume de vegetação, permitindo uma poupança considerável do produto fitossanitário.
Para além da deteção do volume de vegetação, o GRAP está a desenvolver um sistema de controlo e pulverização em tempo real baseado na superfície foliar do objetivo a tratar (densidade), dimensionada graças à informação de sensores LiDAR. Neste caso, a economização do produto continua a ser considerável e o tratamento muito mais preciso, dado que a calda pulverizada é sempre proporcional à superfície foliar que em cada momento se encontra no alcance do equipamento de tratamento.
A aplicação variável de insumos também pode ser implementada em outras operações habituais nos cultivos, como a semente, a rega ou a fertilização. As técnicas de Agricultura de Precisão que se desenvolveram para cada um destes casos são muito diversas e a sua exposição detalhada supera os limites deste artigo.
Por exemplo, para o controlo da rega é preciso mencionar o extraordinário desenvolvimento da telemetria, que permite integrar os dados de sensores de humidade do solo ou do estado da planta e controlar à distância o sistema de irrigação, atuando sobre as bombas e as válvulas.
Relativamente à aplicação variável de fertilizantes e concretamente de nitrogénio, esta apresenta uma grande semelhança com a aplicação variável de fitossanitários. A aplicação deste elemento nos cultivos é um fator chave no rendimento final das colheitas e também supõe um risco importante para o meio ambiente, no caso de se fazer de forma incorreta.
Dado que as necessidades dependem em grande parte do estado do cultivo durante o seu ciclo, desenvolveram-se sistemas de deteção, próximos ou remotos, baseados tanto em aspetos morfológicos (densidade, volume, LAI) como de cor (análise espectral) que, tal como já se comentou, tanto podem ser utilizados para definir mapas de fertilização como para controlar uma aplicação em tempo real. No que se refere à atuação sobre os equipamentos de distribuição de fertilizantes, esta é conseguida através da variação automática do fluxo do produto, proporcionado pela máquina, tendo presente que esta variação pode ter efeitos na uniformidade da distribuição, como no caso das máquinas de adubo de disco centrífugas.
CONCLUSÕES
A Agricultura de Precisão está a ser chamada de agricultura do século XXI. Contudo, a sua implantação comercial é desigual segundo o tipo de cultivo e está a levar muito tempo. Por isso, os investigadores, os técnicos e os fabricantes de equipamentos devem unir esforços para mostrar aos agricultores e à sociedade as vantagens desta Agricultura.
AGRADECIMENTOS
Os resultados apresentados neste artigo foram parcialmente financiados pelos Ministérios espanhóis da Ciência e Tecnologia e da Ciência e Inovação e pelo Fundo Europeu de Desenvolvimento Regional (FEDER) através dos projetos de investigação PULVEXACT (AGL2002-04260-C04-02), OPTIDOSA (AGL2007-66093-C04-03) e SAFESPRAY (AGL2010-22304-C04-03).
Por: E. Gregorio López1, A. Escolà1, S. Planas de Martí1, F. Solanelles Batlle2, J.A. Martínez Casasnovas3 e J. R. Rosell Polo1
1Grupo de Investigação em AgróTICa e Agricultura de Precisão, Departamento de Engenharia Agroflorestal, Universidade de Lleida (UdL) 2Grupo de Investigação em AgróTICa e Agricultura de Precisão, Centro de Mecanização Agrária, Departamento de Agricultura, Pecuária, Pesca, Alimentação e Meio Ambiente, Generalitat de Catalunya 3Grupo de Investigação em AgróTICa e Agricultura de Precisão, Departamento de Meio Ambiente e Ciências do Solo, Universidade de Lleida (UdL)
Tradução: João Duarte Barbosa
Bibliografia
1. Air Assisted Sprayers Project (1997): Reduction of pesticide Inputs to fruit and vineyard crop production. EU - 3FP AIR CT - 1304. Final Report.
2. Rosell, J.R., Llorens, J., Sanz, R., Arnó, J., Ribes-Dasi, M., Masip, J., Escolà, A., Camp, F., Solanelles, F., Gràcia, F., Gil, E., Val, L., Planas, S., Palacín, J. (2009): Obtaining the three-dimensional structure of tree orchards from remote 2D terrestrial LIDAR scanning. Agricultural and Forest Meteorology 149(9), 1505-1515. DOI: 10.1016/j. agrformet.2009.04.008
3. Rosell, J.R., Sanz, R. (2012): A review of methods and applications of the geometric characterization of tree crops in agricultural activities. Computers and Electronics in Agriculture 81, 124-141. DOI:10.1016/j. compag.2011.09.007